 Enviando corrección, espere un momento...
Enviando corrección, espere un momento...

VER RESUMEN
Ingenieros del MIT avanzan en el desarrollo de insectos robóticos para la polinización artificial, con la meta de enviar enjambres de colmenas mecánicas para mejorar la agricultura. El nuevo modelo logró un vuelo estacionario de 1.000 segundos, 100 veces más que antes, con mayor precisión y agilidad.
Desde hace ya tiempo que en la ingeniería se está trabajando con la posibilidad de la polinización artificial para el futuro, cuando pequeños insectos robóticos voladores apoyen a las abejas en esta importante tarea.
Ahora, ingenieros del Instituto Tecnológico de Massachusetts (MIT) están avanzando en ello y esperan, algún día, enviar enjambres de colmenas mecánicas para realizar polinización rápida y precisa, en busca de mejorar la agricultura.
Uno de los mayores desafíos de estos robots, es que logren la resistencia, velocidad y maniobrabilidad de los insectos, algo que la ingeniería todavía no es capaz de imitar. Pero va encaminada a ello.
El MIT revisó el diseño de sus modelos previos y desarrollaron nuevos robots más pequeños y ágiles que los anteriores. De hecho, ahora lograron un vuelo estacionario de 1.000 segundos, que es 100 veces más tiempo que lo que habían conseguido anteriormente.
Los ingenieros mejoraron su precisión y agilidad de vuelo, y al mismo tiempo minimizaron el estrés mecánico que producen las flexiones de sus alas. Esto se traduce a maniobras más rápidas, más resistencia y más vida útil.
“Con la vida útil mejorada y la precisión de este robot, nos estamos acercando a algunas aplicaciones muy interesantes, como la polinización asistida”, señala Kevin Chen, profesor asociado del Departamento de Ingeniería Eléctrica y Ciencias de la Computación (EECS), jefe del Laboratorio de Robótica Blanda y Micro dentro del Laboratorio de Investigación en Electrónica (RLE), y autor principal de un artículo sobre este diseño que se publicó en Science Robotics.
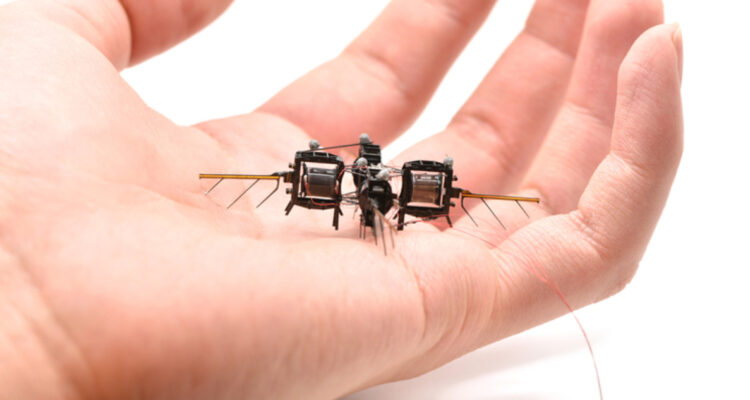
Insectos robóticos con alas
Estos robots se construyen en partes y se ensamblan, pero el problema de los primeros diseños es que estaban divididos en 4 unidades con dos alas por cada una. Es decir, un insecto con 8 alas, lo cual no existe en la naturaleza.
Pero con el tiempo notaron que, tantas alas expulsaban aire con sus movimientos, lo que reducía la fuerza de estas mismas y aquello afectaba al sustento del robot en el aire.
Ahora, optaron por poner solo un ala en cada una de las unidades, apuntando en dirección opuesta al centro del robot, “lo que estabiliza y aumenta su fuerza de sustentación”, dice el comunicado del MIT.

Con menos alas, consiguieron más espacio para que el robot pueda transportar otros componentes electrónicos, como las baterías y los sensores.
Los ingenieros también “crearon transmisiones más complejas que conectan las alas a los actuadores, o músculos artificiales, que las mueven. Estas transmisiones duraderas, que requirieron el diseño de bisagras de alas más largas, reducen la tensión mecánica que limitaba la resistencia de las versiones anteriores”.
El diseño permite un control tres veces más certero sobre el robot, “por lo que podemos realizar vuelos de búsqueda de trayectoria muy sofisticados y muy precisos”, explica Chen.
Pero el camino todavía es largo para los robots polinizadores, y es que los músculos artificiales no igualan el complejo sistema muscular de las abejas, que tienen un control mucho más sofisticado de su aleteo.
“Al final, hemos demostrado un vuelo 100 veces más largo que el que cualquier otro en este campo ha sido capaz de hacer, por lo que este es un resultado extremadamente emocionante”, añade Chen. El siguiente paso es conseguir 10.000 segundos de vuelo estacionario.
“Esta nueva plataforma robótica es un gran resultado de nuestro grupo y abre camino a muchas direcciones interesantes. Por ejemplo, la incorporación de sensores, baterías y capacidades informáticas en este robot será un objetivo central en los próximos tres a cinco años”, concluye.