Resumen generado con una herramienta de Inteligencia Artificial desarrollada por BioBioChile y revisado por el autor de este artículo.
Ingenieros de la NASA han comenzado a probar prototipos de un concepto de misión espacial futurista que involucra un enjambre de robots submarinos para buscar señales de vida en mundos oceánicos. La nave Europa Clipper realizará 49 sobrevuelos por la luna Europa, de Júpiter, en busca de evidencia de vida en su océano bajo la superficie, pero los equipos ya están desarrollando la próxima generación de robots que podrían sumergirse en las profundidades acuáticas de Europa y otros mundos oceánicos.
Ingenieros de la NASA comenzaron a probar prototipos de un concepto de misión espacial futurista: un enjambre de robots submarinos que podrían buscar señales de vida en mundos oceánicos.
Cuando la nave Europa Clipper, de la NASA, llegue a su destino en 2030, la nave espacial hará 49 sobrevuelos por la luna Europa, de Júpiter, en busca de señales de que el océano debajo de la corteza helada de la luna podría albergar vida.
Si bien la nave espacial, que se lanzó el 14 de octubre, lleva el hardware científico más avanzado que la NASA haya enviado jamás al sistema solar exterior, los equipos ya están desarrollando la próxima generación de conceptos robóticos que podrían sumergirse en las profundidades acuáticas de Europa y otros mundos oceánicos, llevando la ciencia aún más lejos.
Aquí es donde entra en juego un concepto de misión de exploración oceánica llamado SWIM. El proyecto, abreviatura de Sensing With Independent Micro-swimmers (Sensores con micronadadores independientes), prevé un enjambre de docenas de robots nadadores autopropulsados del tamaño de un teléfono móvil .
Una vez que un criobot derretidor de hielo los lleve a un océano subterráneo, se moverán a toda velocidad en busca de señales químicas y de temperatura que puedan indicar vida.
“La gente podría preguntarse por qué la NASA está desarrollando un robot submarino para la exploración espacial. Es porque hay lugares en el sistema solar a los que queremos ir para buscar vida, y creemos que la vida necesita agua. Por eso necesitamos robots que puedan explorar esos entornos de forma autónoma, a cientos de millones de kilómetros de casa“, dijo en un comunicado Ethan Schaler, investigador principal de SWIM en el Laboratorio de Propulsión a Chorro de la NASA.
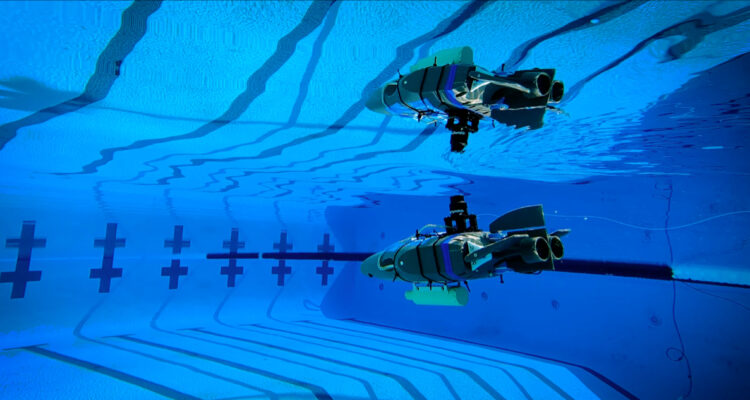
En desarrollo en el JPL, una serie de prototipos para el concepto SWIM desafiaron recientemente las aguas de una piscina de competición de 23 metros en instalaciones en Caltech para realizar pruebas. Los resultados fueron alentadores, dijo la agencia espacial.
La última versión del equipo SWIM es un prototipo de plástico impreso en 3D que se basa en motores y componentes electrónicos de bajo costo fabricados comercialmente. Impulsado por dos hélices, con cuatro aletas para la dirección, el prototipo demostró maniobras controladas, la capacidad de mantenerse en el rumbo y corregirlo, y un patrón de exploración de ida y vuelta como el de una “cortadora de césped”.
Todo esto lo logró de manera autónoma, sin la intervención directa del equipo. El robot incluso deletreó “J-P-L”.
Por si acaso el robot necesitaba ser rescatado, lo sujetaron a un sedal y un ingeniero que llevaba una caña de pescar trotó junto a la piscina durante cada prueba. Cerca de allí, un colega revisó las acciones del robot y los datos de los sensores en una computadora portátil. El equipo completó más de 20 rondas de pruebas de varios prototipos en la piscina y en un par de tanques en el JPL.
El prototipo en forma de cuña utilizado en la mayoría de las pruebas en piscina tenía aproximadamente 42 centímetros de largo y pesaba 2,3 kilogramos. Tal como fueron concebidos para los vuelos espaciales, los robots tendrían dimensiones aproximadamente tres veces más pequeñas, diminutos en comparación con los vehículos científicos submarinos autónomos y operados a distancia existentes.
Los nadadores del tamaño de la palma de la mano presentarían piezas miniaturizadas diseñadas específicamente para ese fin y emplearían un novedoso sistema de comunicación acústica submarina inalámbrica para transmitir datos y triangular sus posiciones.
Las versiones digitales de estos pequeños robots tuvieron su propia prueba, no en una piscina sino en una simulación por computadora. En un entorno con la misma presión y gravedad que probablemente encontrarían en Europa, un enjambre virtual de robots de 12 centímetros de largo buscó repetidamente posibles señales de vida.
Las simulaciones por computadora ayudaron a determinar los límites de las capacidades de los robots para recopilar datos científicos en un entorno desconocido y condujeron al desarrollo de algoritmos que permitirían al enjambre explorar de manera más eficiente.
Estas pruebas también ayudaron al equipo a comprender mejor cómo maximizar el rendimiento científico teniendo en cuenta las compensaciones entre la duración de la batería (hasta dos horas), el volumen de agua que los nadadores podían explorar (alrededor de 86.000 metros cúbicos) y la cantidad de robots en un solo enjambre (una docena, enviados en cuatro o cinco oleadas).
Además, un equipo de colaboradores de Georgia Tech en Atlanta fabricó y probó un sensor de composición del océano que permitiría a cada robot medir simultáneamente la temperatura, la presión, la acidez o alcalinidad, la conductividad y la composición química. Con apenas unos pocos milímetros cuadrados, el chip es el primero que combina todos esos sensores en un pequeño paquete.
Por supuesto, un concepto tan avanzado requeriría varios años más de trabajo, entre otras cosas, para estar listo para una posible misión futura de vuelo a una luna helada.
Nuestra sección de OPINIÓN es un espacio abierto, por lo que el contenido vertido en esta columna es de exclusiva responsabilidad de su autor, y no refleja necesariamente la línea editorial de BioBioChile
Estamos recopilando más antecedentes sobre esta noticia, quédate atento a las
actualizaciones.
Alerta de Spoiler
Este artículo podría contener información clave sobre la trama de un libro, serie o
película.
Advertencia de imágenes explícitas
¡Cuidado! Las imágenes de este artículo pueden herir la sensibilidad de algunas personas.
VER RESUMEN
Resumen generado con una herramienta de Inteligencia Artificial desarrollada por BioBioChile y revisado por el autor de este artículo.
{{ post.resumen_de_ia }}
Este artículo describe un proceso judicial en curso
Existe la posibilidad de que los cargos sean desestimados al finalizar la investigación, por
lo cual NO se debe considerar al o los imputados como culpables hasta que la Justicia
dicte sentencia en su contra. (Artículo 04 del Código Procesal Penal)
Violencia contra la mujer
Si eres víctima o testigo de violencia contra la mujer, denuncia al
149 de Carabineros, recibe orientación llamando al
número corto 1455 del Sernameg o pulsa para
usar el chat de orientación Sernameg
Suicidio
Si necesitas ayuda psicológica especializada o conoces a alguien que la requiera, el Ministerio
de Salud tiene un teléfono de ayuda atendida por profesionales todos los días del año y las 24 horas,
marcando desde celulares el *4141. Además, puedes recurrir a Salud Responde en el 600 360 7777.
Las personas sordas pueden recibir asistencia ingresando a
este enlace.
Transporte privado
Las aplicaciones de transporte privado pagado aún no se encuentran normadas por la legislación chilena.
Estudio científico
Este artículo se basa en un estudio científico que puede ser sometido a nuevas pruebas para ser validado o descartado. Sus resultados NO deben considerarse concluyentes.
 Enviando corrección, espere un momento...
Enviando corrección, espere un momento...